
最短寻道时间优先算法(SSTF)
SSTF问题描述:
SSTF算法选择调度处理的磁道是与当前磁头所在磁道距离最近的磁道,以使每次的寻找时间最短。当然,总是选择最小寻找时间并不能保证平均寻找时间最小,但是能提供比FCFS算法更好的性能。这种算法会产生“饥饿”现象。
优点
改善了磁盘平均服务时间。
缺点
优先级低的进程会发生“饥饿”现象。因为新进程请求到达,且其所要访问的磁道与磁头当前所在的磁道距离较近,必先优先满足。
思想:
本算法是对输入的磁道首先进行非递减排序,然后判断当前磁头所在的磁道是否在将要寻找的磁道中,分别进行最短寻道时间计算。(如下图示,表示SSTF示意图)

不是最优的例子:
若干个等待访问磁盘者依次要访问的磁道为 100,142,150,155,170,300,当前磁头位于 150 号柱面,若用最短寻道时间优先磁盘调度算法,则访问序列为
根据最短寻道时间优先磁盘调度算法,每次在寻找下一个磁道时,都要选择离自己最近的,所以当前磁头位于40号,下一道选择与40绝对值最小的,即40,再下一道选择43,差值为3,以此类推,最后的访问序列应该为,
hexo
SSTF算法选择调度处理的磁道是与当前磁头所在磁道距离最近的磁道,以使每次的寻找时间最短。当然,总是选择最小寻找时间并不能保证平均寻找时间最小,但是能提供比FCFS算法更好的性能。这种算法会产生“饥饿”现象。
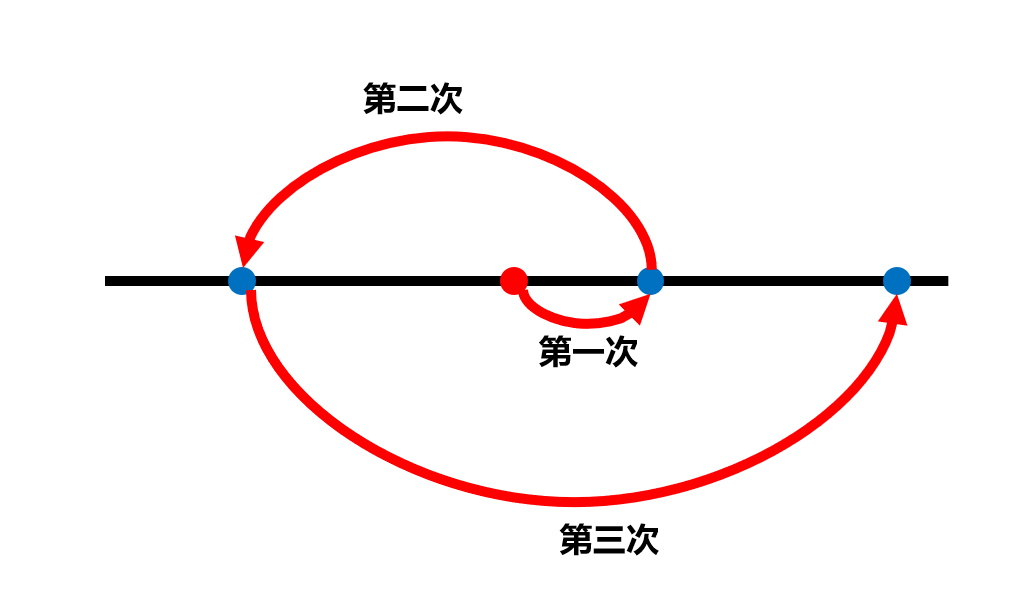
简单想:
可以想象这样一个序列,磁头目前在最中间。
- 第一次寻道,离磁头最近磁道的在中点的左边,磁头移动到该位置。
- 第二次寻道,离磁头最近磁道的在中点的右边,磁头移动到该位置。
- 第三次寻道,离磁头最近磁道的在中点的左边,磁头移动到该位置。
- …
如此,磁头一直在中点往复,显然不如寻完一侧的磁道再寻另一侧更优。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Naylen's Blog!
相关推荐






评论